




Sysrox IMU AHRS 10DOF ICM-42688 + MMC5983 + LPS22
Sold by Sysrox's store
$35.04
No tax for United States [change]
🇪🇺 Free Shipping for Europe
Key points

✏️ SYSROX IMU AHRS HIGH-PERFORMANCE 10DOF including 3-axis accelerometer, 3-axis gyrometer, 3-axis magnetometer, and barometer
✏️ NEXT-GENERATION SENSORS (ICM42688p, MMC5983MA, LPS22HB) to replace older, lower-performance MPU6050-MPU6500-MPU9250-BMP280
✏️ HIGH-PRECISION TCXO QUARTZ to reduce gyrometer drift (< 7° in run bias)
✏️ COMPLETE SOFTWARE for sensor reading, 500Hz measurement fusion with extended Kalman Filter, real-time Fast Fourier decomposition in 7 windows sizes (64-4096), logging and data communication (CAN, protobuf, mavlink)
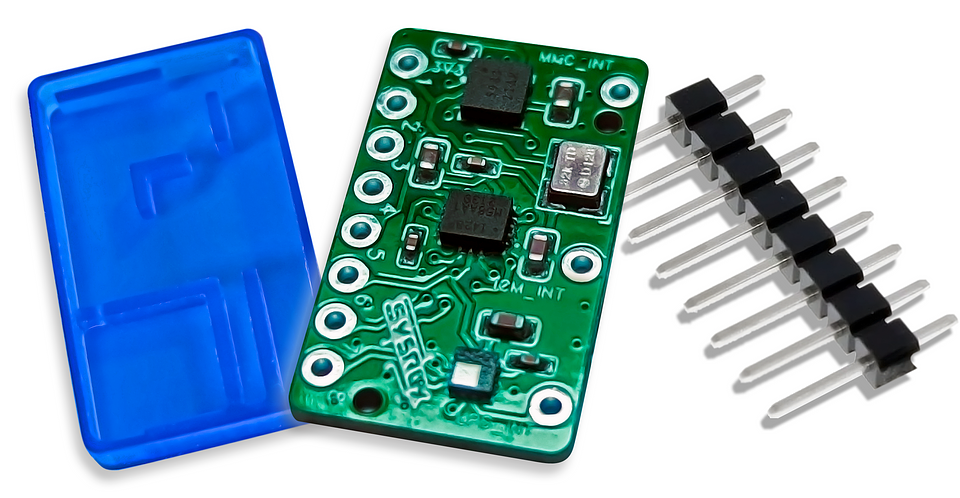
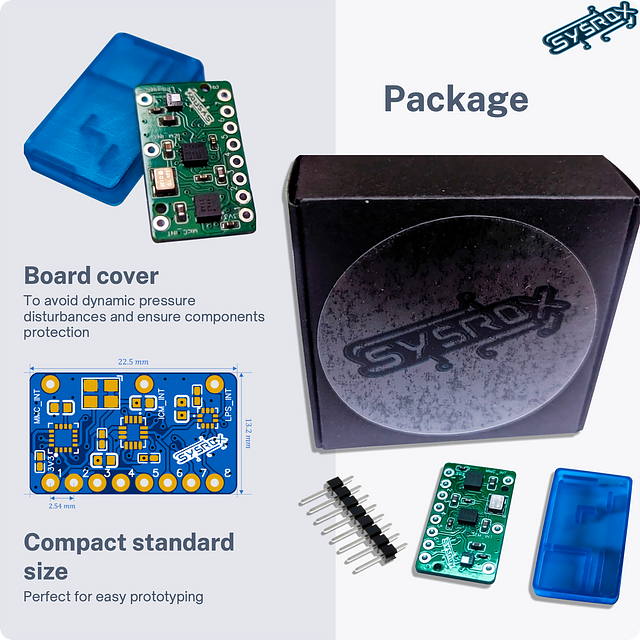
✏️ MINIATURE DEVELOPMENT BOARD with 2.54 mm pin spacing for easy prototyping
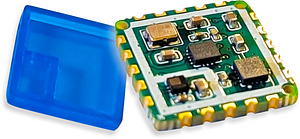
✏️ PROTECTIVE GLUE-ON COVER INCLUDED for component protection and reduced disturbances on barometer
✏️ COMPREHENSIVE DOCUMENTATION allowing easy usage of the board and extension of the proposed functionalities
What is it?
Description
The SRX-INS00-DEV is a high-performance IMU (Inertial Measurement Unit) that can be used as the basis for an AHRS (Attitude Heading Reference System).
It includes:
- A 3-axis accelerometer: ICM42688p
- A 3-axis gyrometer: ICM42688p
- A magnetometer: MMC5983MA
- A barometer: LPS22HB
... in the form of a miniature development board perfect for the development and prototyping of robotic applications.
Combined with the included C++ library, it enables 360° drift-free attitude measurements and accurate altitude and vertical speed measurements.
Software Included
A complete and customizable software is included, allowing a quick exploitation of the board.
✅ It can be deployed on ESP32-S3 immediately.
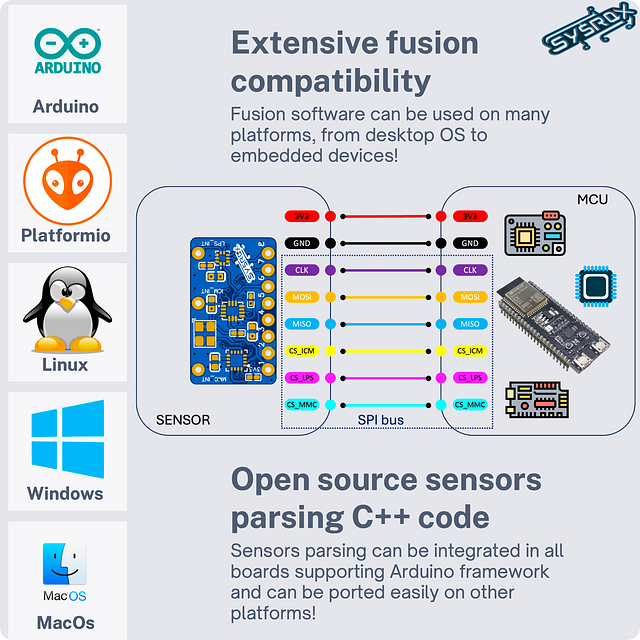
✅ Reading of all 3 sensors is available on any microcontroller with the Arduino framework.
⚠️ The proposed board only includes the sensors and no microcontroller which will have to be added and connected to the board to be able to benefit from the features mentioned
The proposed program allows:
- Reading of the 4 sensors (compatible with any microcontroller with Arduino framework)
- Processing of raw data (filtering, etc.) in order to extract more reliable and less noisy information (esp32s3, teensy4x, Windows, Linux, MacOS compatible, etc.)
- Data fusion to extract attitude and altitude information (compatible with ESP32S3, Teensy4X, Windows, Linux, MacOS, etc.)
- Data communication on hardware bus by Protobuf or Mavlink (esp32s3, teensy4x compatible) CAN communication (ESP32S3 compatible)
- Log raw or processed data on an SD card at high speed (esp32s3 and teensy4.x compatible) ...

Sensor Fusion Features
- Proprietary algorithm including a robust extended Kalman filter for 360° orientation tracking with high accuracy.
- Adaptive algorithms ensure efficient disturbance rejection even in complex environments.
- Real-time monitoring and gyrometer bias compensation.
- A set of customizable parameters to adapt the algorithm to specific constraints.
- Calibration tools are provided (magnetometer, accelerometer) to ensure maximum accuracy.

The included sensor fusion library is as a precompiled archive for the following platforms:
- Linux
- Windows
- MacOs Apple Silicon
- Esp32-s3
- Teensy 4.X
📌 It can be pre-compiled for any microcontroller supported by platformio on demand!
Comprehensive Documentation
Easily extend your application's capabilities with comprehensive, regularly updated documentation:
Card Features
✏️ Dimensions: 22.5mm x 13.2mm x 1.2mm
✏️ Power supply: 3.3V
✏️ Interfaces: SPI (used by the proposed code), I2C.
📌 The board footprint is available for EasyEDA: Link to footprint
Achievable performance with fusion
- Pitch/Roll (Static) ........................... 0.5° RMS
- Pitch/Roll (dynamic) ...................... 1.0° RMS
- Relative (static) Yaw ...................... 1.0° RMS
- Absolute (static) Yaw .................... 3.0° RMS
- Vertical Speed................................ 0.2 m∙s^(-1) RMS
- Relative Altitude............................ 1.0 m
- Range (Yaw/Pitch/roll) .................. ±180°/±90°/±180°
- Angular Resolution........................ 0,0001°
- Vertical Velocity Resolution........... 0.0001 m∙s^(-1)
- Altitude Resolution........................ 2∙10^(-7) m
Raw sensor performance (default setting of the supplied software)
These measurements were made with the proposed software and with the default parameters used for the reading of the sensors. For more information on the possibilities of each sensor, please refer to the supplier datasheet.
✔️ Gyrometer (ICM42688p)
- Range .............................. ±2000 °/s
- Noise (RMS): ................... 0.045 deg/s
- Resolution:...................... 0.0038 deg/s
- In run bias: ...................... <7°
- Polling frequency: ......... 500 Hz
- Bandwidth (-3dB): ........ 230.7 Hz
✔️Accelerometer (ICM42688p)
- Range ............................. ±16 g
- Noise (RMS): .................. 0.85 mg for XY, 1.15 mg for Z
- Resolution:..................... 3.0518∙10^(-5) g
- Polling frequency: ......... 500 Hz
- Bandwidth (-3dB): ........ 230.7 Hz
✔️Magnetometer (MMC5983MA)
- Range ............................. ±8 Gauss
- Noise (RMS): .................. 0.6 mGauss
- Resolution:..................... 0.061 mGauss
- Polling frequency: ......... 100 Hz
- Bandwidth (-3dB): ........ 50 Hz
✔️Barometer (LPS22HB)
- Range ............................. 260-1260 hPa
- Noise (RMS): .................. 0.0087 hPa (0.073m)
- Resolution:..................... 0.0244 Pa (0.002 m)
- Polling frequency: ......... 71.4 Hz
- Bandwidth (-3dB): ....... 35.7 Hz
Why did you make it?
Because this sensors combination can not be found in a miniature development board form factor. Actually this sensors packages together outperforms older combos composed of mpu9250, mpu6500, bmp280 ... It is indeed the perfect match for any kind of robotic application (quadcopter, rover...) requiring high performance 10 dof measurements, especially coupled with the provided fusion software!
What makes it special?
The software included developed for the board outperforms integrated solutions like BNO055 or DMP from mpu9250 and gives performances close to best in class plug and play professional AHRS solutions sold many times the price!
Links to code and documentation
Documentation (doc.sysrox.com)
Shipping policy
Free shipping in Europe
The seller
Sysrox's objective is to provide ready-to-use robotic systems, coupled with powerful and documented software, enabling easy use!
Feel free to visit our website https://sysrox.com for more information, and don't hesitate to contact me at contact@sysrox.com for any specific inquiries.